
一、高德定位技术概述
定位技术是支撑高德地图的导航、交通等核心业务的关键基础技术,他的主要任务是确定物体(通常是人或车)在一个相对固定的坐标系中的位置和姿态。我们用手机高德地图作为例子来说明都有哪些技术在实际应用场景中发挥作用。
通常手机的基础定位能力是由手机的GNSS芯片提供的,它为我们在室外的绝大部分场景下提供了5~10米的定位精度。但是在卫星信号不好的时候,定位可能会漂移,我们需要识别出这种情况。另外,当信号受到干扰的时候,位置可能出现有规律的偏移,我们也要识别出干扰,并且在可能的情况下重新解算出正确的位置。当GNSS定位不准的时候,想要持续定位,可以利用传感器识别出步行/驾车状态,再进行航位推算(PDR、VDR)。当进入室内卫星信号丢失了,常用的定位方法是根据手机扫描的基站和Wifi、蓝牙等信号做网络定位。
上面这些技术提供了基础的位置坐标,而在导航过程中,我们更关心的是行驶在哪条路上,有没有偏航,距离下个路口有多远,想得到这些信息就需要用到地图匹配技术。在一些非常复杂的场景下,比如高架桥、主辅路,判断道路变得非常困难,这时候还需要用到一些专门的识别模型来解决匹配问题。
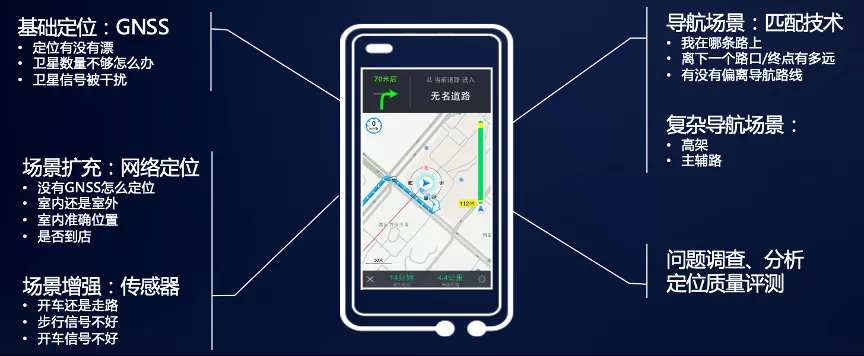
图1 手机高德地图中的定位技术
上面提到的只是具体一个业务场景中的部分技术,下面展示了高德定位技术的一个更完整的大图。总的来讲,我们是通过构建一套“云+端+数据”的完整的技术体系,并建设质量迭代系统保证各技术模块的持续更新迭代,来支撑众多的定位业务应用。
Comments